通信协议 - CAN 🚧
CAN(Controller Area Network)是一种多主方式的串行通讯总线。基本设计规范要求有高的位速率、高抗电磁干扰性,而且能够检测出产生的任何错误,当信号传输距离达到 10Km 时 CAN-bus 仍可提供高达 5Kbps 的数据传输速率。
CAN 电路设计
CAN 模块的设计,是基于 CAN 芯片,对串行信号(RX/TX)与 CAN 差分信号(CANH/CANL)进行互相转换。以下是两种较为常用的 CAN 收发器。
基于 TJA1050
完整资料请见 Modularity_of_Functional_Circuit/ 模块设计 - CAN 通信 / 基于 TJA1050
特性
- 供电:5 V(4.75-5.25 V)
- 高速率:60 Kbps-1 Mbps
- 完全符合 ISO 11898 标准
- 低电磁辐射(EME)
- 具有贷款输入范围的差动接收器,可抗电磁干扰(EMI)
- 可以连接至少 110 个节点
- 没有上电的节点不会对总线造成干扰
工作模式
TJA1050 有两种工作模式(高速 / 静音),由引脚 S(RS) 来控制。
高速模式:
高速模式是普通的工作模式,将引脚 S 接地即可进入该模式。因引脚 S 内置下拉,所以即使外部没有连接,默认也是高速模式。
在这个模式中,总线输出信号有固定的斜率,并以最快的速度切换,适合于最大的位 速率和,或最大的总线长度,此时它的收发器循环延迟最小。
静音模式:
静音模式中,发送器是禁能的,不管 TXD 的输入信号,所以运行在非发送状态中消耗的电源电流,和在隐形状态中是一样的。将引脚 S 接高电平就可以进入静音模式。
静音模式中,节点可以被设置成对总线绝对无源的状态,此时微控制器不再直接访问 CAN 控制器,TJA1050 将会释放总线。
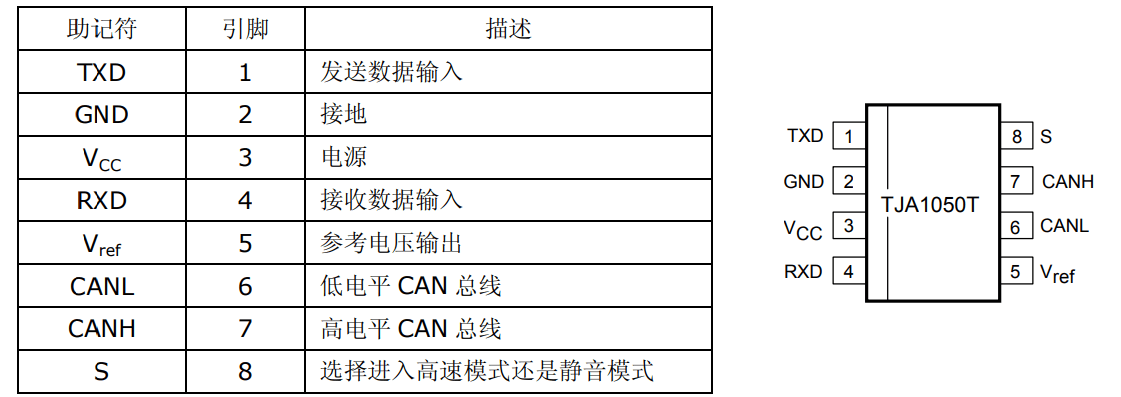
芯片管脚
参考电路
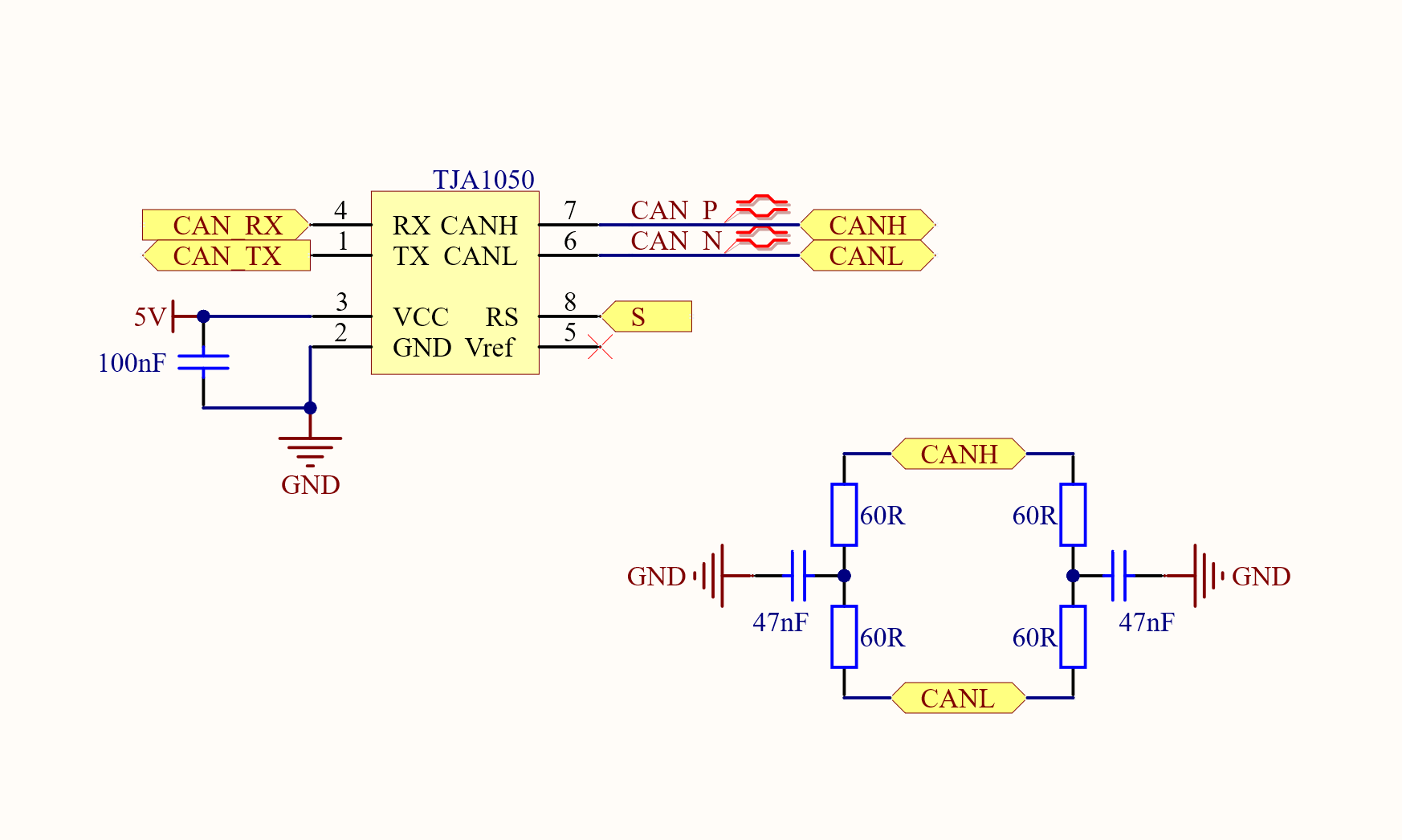
如图,CAN 协议控制器(例如单片机)通过串行线(RX/TX)连接到收发器,在收发器上转换为 CAN 信号(CANH/CANL),并通过引脚 S 来选择高速 / 静音模式。
基于 SN65HVD230
完整资料请见 Modularity_of_Functional_Circuit/ 模块设计 - CAN 通信 / 基于 SN65HVD230
特性
- 由 3.3 V 单电源供电
- 可以连接至少 120 个节点
- 低电流待机模式
- 速率:最高 1 Mbps
工作模式
SN65HVD230 有三种工作模式(高速 / 斜率 / 静音),由引脚 S(RS) 来控制。一般我们使用高速模式。
高速模式:
将 Rs 强下拉至 GND 以启用高速模式。
斜率模式:
使用 10k 至 100k 之间的电阻,将 Rs 下拉至 GND。具体电阻阻值与速率的关系,请参考数据手册。
低功耗模式:
将 Rs 强上拉至 3.3V
芯片管脚

参考电路
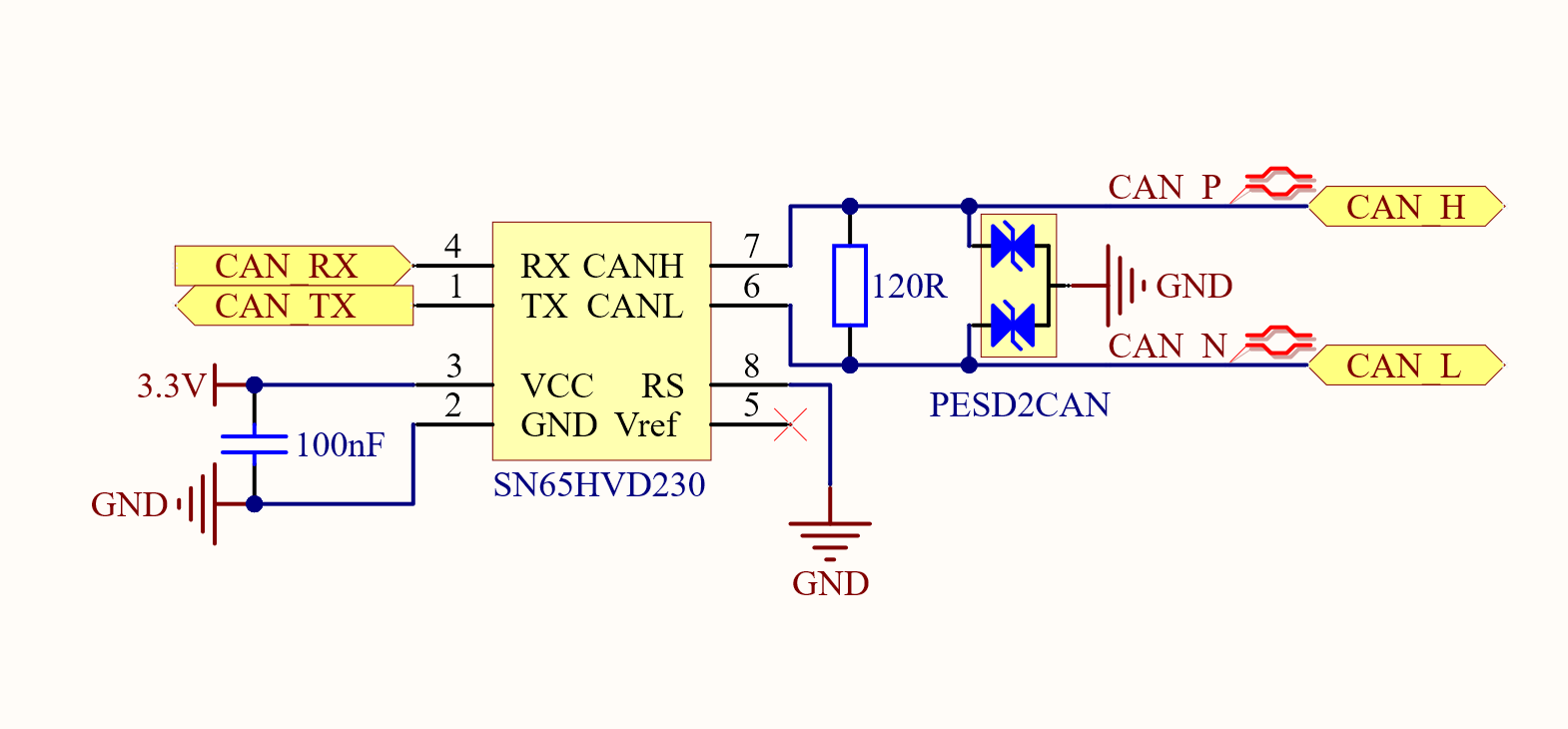
PESD2CAN 是 CAN 专用的 ESD 保护二极管,保护芯片免受静电和其他瞬变因素的损害。
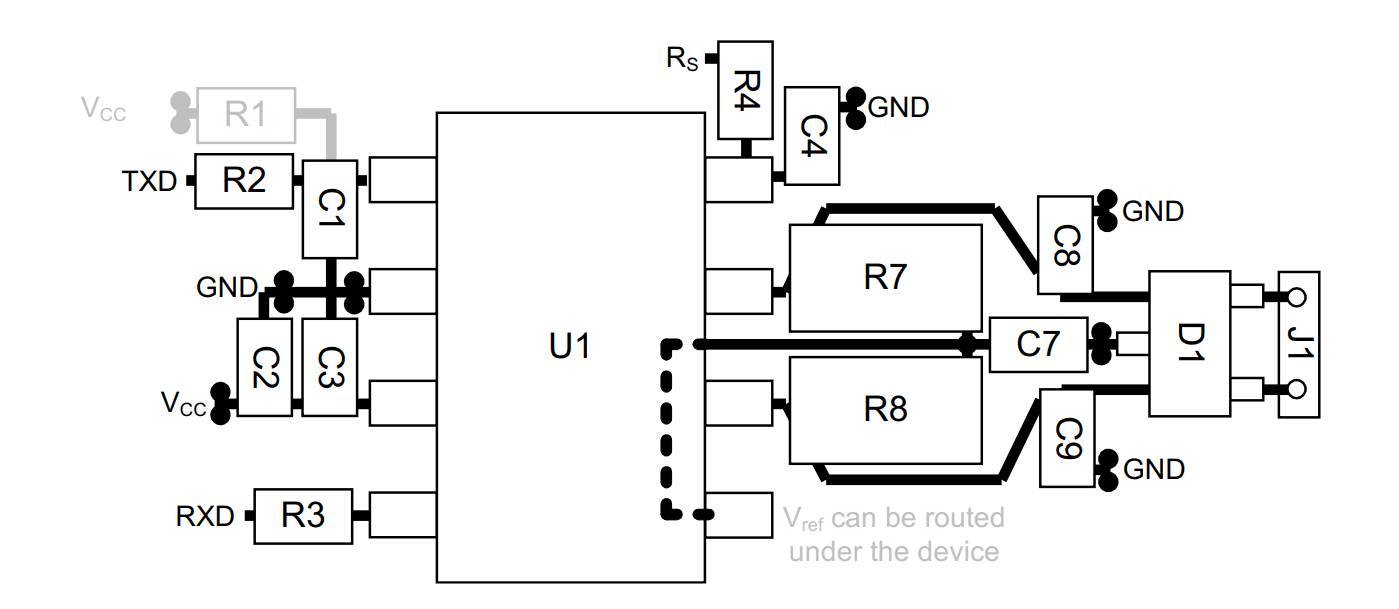
参考的 PCB 布局如下:
TJA1050 与 SN65HVD230 的异同
TJA1050 与 SN65HVD230 主要的区别是工作电压的不同,TJA1050 工作在 5 V 环境下的,而 SN65HVD230 工作在 3.3 V 环境下。
共同的注意事项:
- CAN 信号线在 PCB 布线的时候,要走差分线。
- 末端电阻一般在 CAN 线起始端和末端才需要使用,中间端不需要外加。
- 如果需要对总线的共模电压进行过滤和稳定,也可以使用分体式末端电阻(如上文所示,分为两个 60 Ω 电阻,中间加连接到地的电容)。
CAN 接口 EMC 设计
CAN 通讯中,电缆容易耦合外部干扰,对信号传输造成影响,甚至会通过接口电路影响内部核心敏感电路。
CAN 接口防护器件主要包括:滤波电容、共模电感、跨接电容、TVS 管。

- 滤波电容 :用于给干扰提供低阻抗的回流路径,选取范围为 22pF~1000pF,典型值为 100pF。
- 共模电感 :用于滤除差分线上的共模干扰,阻抗选取范围为 120Ω/100MHz~2200Ω/100MHz,典型值为 600Ω/100MHz。
- 跨接电容 :用于接口地和数字地之间的隔离,典型值为 1000pF/2kV。
- TVS 管 :用于防 ESD 或瞬间的高能量冲击,使其线路的电压钳位在一个预定的数值内,从而确保后面的电路器件免受瞬态高能量的冲击而损坏。
参考与致谢
本篇文章受 CC BY-NC-SA 4.0 协议保护,转载请注明出处。